

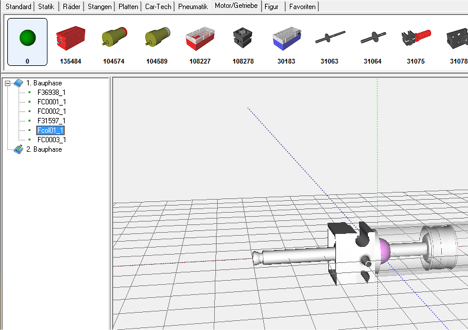
Ein Pneumatik Zylinder soll mit der Kinematik-Engine virtuell funktionsfähig konstruiert werden.
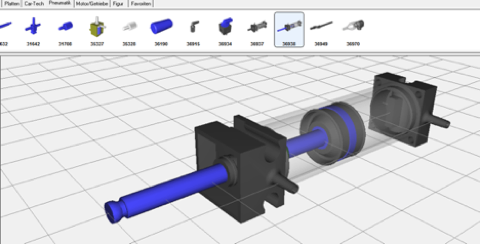
Dieser Zylinder besteht aus 4 Elementen. Um die Zylinderstange bewegen zu können wird ein „Motor“ eingesetzt. Ich habe mich für einen Abstandsring entschieden. Den kann man im Anschlussteil verstecken. (Versuche die Zylinderstange zu verwenden haben zu eigenartigen Verhalten geführt.)
Um die „Rotation-/Translation-Bindung“ zu definieren ist es einfacher wenn man die beiden Teile mit dem Koordinaten-Manager aus dem Zylindergehäuse verschiebt:
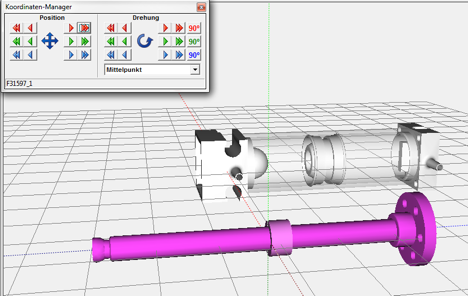
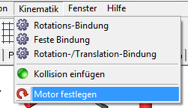
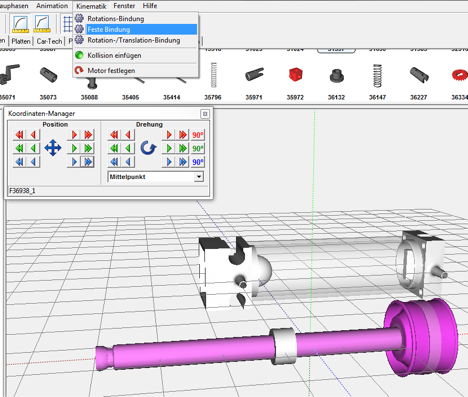
Die beiden ausgewählten Teile werden nun als „Rotation-/Translation-Bindung“ eingerichtet.
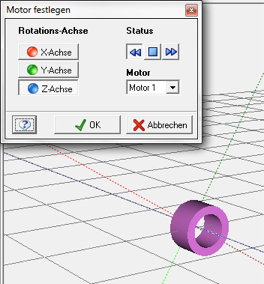
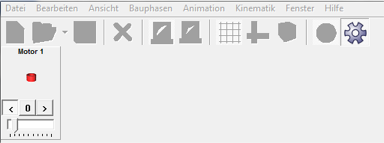
Beachte: Erst den Ring („Motor 1“) anwählen, dann die Kolbenstange.
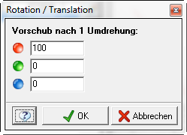
Hier werden die Richtung und der Vortrieb festgelegt. Dieser Wert kann jederzeit geändert werden.
Mittels einer „Festen Bindung“ können jetzt noch die Kolbenstange mit der Kolbenfläche verbunden werden.
Jetzt kann die Funktion mittels „Kinematik Modul starten/beenden“ getestet werden
Damit der Kolben sich automatisch immer hin und her bewegt kann man noch Kollisionskugeln einsetzen. Man kann aber auch mit nur eine Kugel das Ergebnis erzielen, da eine Kugel auch für beide Endpunkte verwendet werden kann.
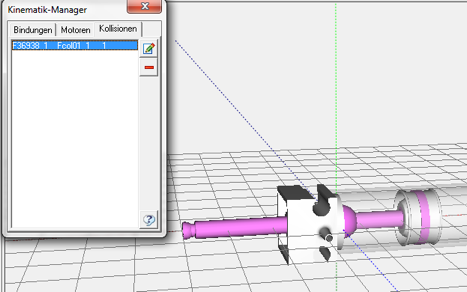
Diese Kugel einfach auf die Kolbenstange platzieren:
Beide Elemente selektieren und eine „Kinematik“ -> „Kollision einfügen“
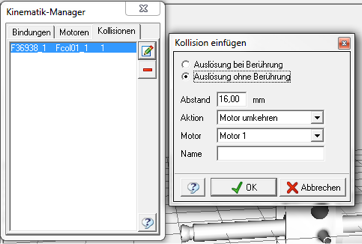
Hier kann man mittels der „Abstand“ Angabe und der Position des Kollisionskugeln die Umkehrpositionen definieren
Tutorial von Joachim Häberlein, Siemens AG
Download Projektdatei „Zylinder mit Kinematik.ftm“